Darbības programmas “Izaugsme un nodarbinātība” 1.2.1. specifiskā atbalsta mērķa “Palielināt privātā sektora investīcijas P&A” 1.2.1.1. pasākumā “Atbalsts jaunu produktu un tehnoloģiju izstrādei kompetences centru ietvaros” SIA “MAŠĪNBŪVES KOMPETENCES CENTRS” no 2019.gada 1.aprīļa līdz 2021.gada 31.decembrim īsteno projektu Nr.1.2.1.1/18/A/008 “Mašīnbūves kompetences centrs”.
Projekta “Mašīnbūves kompetences centrs” ietvaros SIA “PERUZA” sadarbībā ar SIA “WeAreDots” 2019. gada 1.aprīlī uzsāk starpnozaru pētniecības projekta Nr. 4.2 “Kompaktu robotmanipulatoru konteineršūnu izstrāde neviendabīgu objektu apstrādei” īstenošanu.
Pētniecības projekta mērķis ir lielā atkārtojamībā veicamu ražošanas uzdevumu, gan vienkāršu, gan arī sarežģītu, izpilde nemainīgā kvalitātē un ilgstoši, ir ļoti nogurdinošs uzdevums, kuru veicot cilvēks nogurst un zaudē gan tempu, gan uzmanību. Vienlaikus cilvēka iesaiste ir pamatota tikai tiktāl, ciktāl nepieciešams atrisināt tuvojošos vai radušos nestandarta situāciju, kam grūti sagatavot paredzošu algoritmu, lai to izpildītu manipulatori.
Identificēt tās dažādu pārtikas rūpniecību ražošanas procesu tehnoloģiskās vietas, kurās ar datorredzi un mašīnmācīšanās iespēju aprīkotu robotmanipulatoru ieviešana dod lielāko ekonomisko efektu un tām izveidot darbspējīgus prototipus. Risinājumus veidot, paredzot cilvēka un robotmanipulatoru optimālus sadarbības modeļus, veicinot darbinieku darba jēgpilnu piepildījumu un deficītā darbaspēka izvietošanu tajos ražošanas posmos, kuros cilvēka līdzdalība un tieša veikšana ir pamatota un neaizvietojama.
Pētījumu plānots realizēt līdz 2020.gada 31. decembrim.
Projekta kopējās izmaksas plānotas EUR 546 664, tai skaitā EUR 316 389 Eiropas Reģionālās attīstības fonda finansējums.
Laika posmā no 01.04.-30.09 pētījumā veikta pārtikas industrijas analīze un identificētā automatizācijai pakļaujamā ķēdes posma – izlietotā iepakojuma šķirošana pārstrādei un atkārtotai izmantošanai padziļināta izpēte, šķirošanas prasību un problemātikas identificēšana. Izpētīti produkti, materiāli un to īpašības. Izpētīti paņēmieni un instrumenti, lai noteiktu visiespējamāk piemēroto paņēmienu un instrumentu kopu produktu efektīvai atdalīšanai. Izstrādāta mašīnmācīšanās plūsmas vispārējā arhitektūra un principi. Definētas prasības robotmanipulatoru operatīvās vadības signālu apakšsistēmai. Definētas prasības saistītajiem robotmanipulatoru darbināšanas vides konteksta izgūšanas sensoriem.
Uzsākts darbs pie mašīnmācīšanās plūsmas izveides, testa datu kopas objektu apzināšanas, ņemot vērā iepakojumu materiālu fizikālās un vizuālās īpašības.
Laika posmā no 01.08- 30.09. pētījumā uzsākta robotizetu risinājumu apstākļiem piemērotu piedziņu un to vadību zināmo risinājumu izpēte un kritika. Sensoru sistēmu optimālas sadarbības nodrošināšanas esošo, zināmo risinājumu izpēte un dažādu materiālu satvērēju esošo zināmo risinājumu izpēte un kritika.
Laika posmā no 01.10.2019 – 31.12.2019 konstatēts, ka nepieciešams optimizēt pielietojamo sensoru un manipulatoru kombināciju. Manipulatoru sadaļā esam konstatējuši tirgū pieejamo rūpnieciski ražoto robotmanipulatoru raksturīgo koordinātu darbības precizitāti milimetru desmitdaļās, kas ir daudz augstāka nekā daudzos rūpnieciskos pick-and-place uzdevumos nepieciešama precizitāte.
PERUZA paredz izveidot klientiem ekonomiski pieņemamu iekārtas kombināciju ar pielietojumu visos gadījumos, kad koordinātu precizitāte ir ar lielāku pielaidi.
Laika posmā no 01.01.2020 – 30.03.2020
Veidota piemērotu datorredzes un manipulatoru sistēmu kombinēšana un to veiktspējas pārbaude, optimālu salikumu definēšana. Uzsākta, eksperimentālas dažādiem uzdevumiem piemērotas, konteineršūnas izveide.
Veikta mobilās šķirošanas stacijas prototipa sensoru testēšana un regulēšana. Tika sagatavoti eksperimenta iepakojuma paraugi un tie klasificēti atbilstoši definētajai klasifikācijas shēmai, kā arī tika sagatavota testa datu kopa. Uzsākta tīmekļa servisu robotmanipulatoru vadības signālu ģenerēšanai un nodošanai izstrāde.
Ņemot vērā iegūtos pētījumu rezultātus to, kā veidojama optimizēta sensoru un manipulatoru sistēma, ir uzsākta jauna vienkāršota manipulatora izveide, pēc kura izgatavošanas tiks veikta visu mehānisko un mehatronisko sistēmu montāža un testēšana sadarbībā ar galveno vadošo sistēmas datoru un attālinātiem operatoriem.
Laika posmā no 01.04.2020 – 30.06.2020
Abi projekta partneri patlaban realizē 2.aktivitāti “Eksperimentālā izstrāde”.
Iepriekšējā periodā WeAreDots (DOTS) izveidoja mašīnmācīšanās apstrādes plūsma (t.sk. apmācības /validācijas /testa kopu ieguvi, apmācību un pārbaudi, cilvēku un mākslīgo aģentu sniegto koriģējošo signālu iestrādi turpmākā apmācību un novērtēšanas procesā) robotmanipulatora darbināšanas vides konteksta izguvei, izmantojot 1.posmā identificēto sensoru datus un nodrošinot robotmanipulatora operatīvās vadības signālu ģenerēšanu. Diemžēl COVID-19 ierobežojumu dēļ pētījuma dalībniekiem bija liegts ierasties birojā klātienē, tāpēc pārskata periodā nav veikti pētniecības un attīstības darbi.
PERUZA veica mehānisko un mehatronisko sistēmu pilotvarianta montāžu un testēšanu sadarbībā ar galveno vadošo sistēmas datoru un attālinātiem operatoriem. Darbi turpināti, izveidojot karuseļveida pārvietošanas platformu, kas iepakojumus, ko identificējusi WeAreDots atpazīšanas sistēma, nogādātu attiecīgos konteineros.
Laika posmā no 2020.gada aprīļa– 2020.gada septembrim (2.Aktivitāte: Eksperimentālā izstrāde)
PERUZA un WeAreDots, projektu realizējot, veica Eksperimentālās izstrādes sadaļas darbus. Galvenais uzdevums bija radīt darbojošos mehatroniskas pārvietošanas iekārtas prototipu, kas izpildītu WeAreDots izveidotās datorizētas objektu atpazīšanas lēmumus un rīkojumus nogādāt objektu pēc piederības.
Datora realizētā objektu atpazīšana un attiecīga rīkojuma izdošana ir galvenā daļa, lai nodrošinātu robotšūnas sekmīgu sadarbību ar attālinātu operatoru-ekspertu, kura uzdevums ir piedalīties objekta atpazīšanā, ja dators ar uzdevumu nav ticis galā. Šī uzdevuma daļa ir iesākta risināt, un PERUZA eksperimentālās izstrādes sadaļā ir realizējusi robotmanipulatora vadību no attālināti novietota skārienjutīga monitora, kurā tiek reāllaika režīmā parādīta situācija objektu laukumā. Operators uz attēla atzīmē objektu un dod robotmanipulatoram instrukciju. Noslēguma perioda ir jāīsteno WeAreDots veidotās datorsistēmas interaktīva sadarbība ar attālinato operatoru – ekspertu.
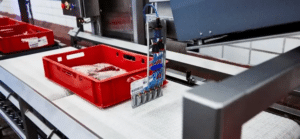
PERUZA eksperimentālās izstrādes sadaļā tika izveidota kompakta karuseļa tipa transportiera konstrukcija, kas optimizē robotšūnas darbību – manipulators atnes priekšmetu līdz vienai novietnei, tad karuselis tos sadala pa atbilstošiem uzkrāšanas konteineriem. Konstrukcijas izstrāde prasīja veikt vairākas konstrukcijas modifikācijas un pārbūves gan tās mehāniskajā, gan vadības risinājumā. Pārbūvju rezultātā iegūta stabili strādājoša konstrukcija. Karuseļa transportiera vadības sistēma pagaidu variantā tika saslēgta ar WeAreDots sagatavoto Webservisa risinājumu, kas nodrošina pietiekami precīzu, taču ne pietiekami ātru reakcijas laiku. Lai uzlabotu prototipa veiktspēju, ir nepieciešams izveidot tieši tam projektētu vadības sitstēmu, kas ir nākamā perioda uzdevums.
Lai realizētu dažādiem uzdevumiem piemērotas konteineršūnas izveidi un pārbaudi reālos apstākļos, tika izstrādāta robotmanipulatora vadības sistēma no attālināti novietota
skārienjutīga monitora, kurā tiek reāllaika režīmā parādīta situācija objektu novietošanas laukumā.
PERUZA sasniegtais 3.starpposma rezultāts: Pētniecības projekta īstenošanas laikā Eksperimentālās izstrādes sadaļā tika izveidots karuseļtipa transportiers ar pašizkraujošām platformām, kurš pilda WeAreDots izveidotās objektu atpazīšanas un novērtēšanas datorsistēmas uzdevumus. Paralēli minētajiem darbiem PERUZA ir izstrādājusi un sākotnēji notestējusi robotmanipulatora attālinātās vadības sistēmu no skārienjutīga ekrāna. Šis risinājums pētījuma noslēguma posmā ir jāsavieto ar iepriekš WeAreDots izstrādāto atpazīšanas un novērtēšanas sistēmu.
Laika posmā no 2020.gada septembra līdz 2020.gada decembrim
Iepakojumu atpazīšanas datorredzes sistēmā integrēta WeAreDots atpazīšanas sistēma. Darbi turpināti pie datorredzes un hiperspektrālās redzes vadības sistēmu salāgošanas un sistēmas darbības ātruma nodrošināšanas. Periodā bija jāveic papildus programmēšanas un testēšanas darbus, savietojot divas objektu atpazīšanas sistēmas – redzamā spektra datorredzi, kas strādā Linux ar hiperspektrālo redzi, kas strādā Windows.
Laika posmā no 01.01. 2021 – 31.03.2021
Pabeigts vadības sistēmu un manipulatoru komplekss ar optimizētu salikumu, pabeigti testi.
Tika būtiski uzlabota objekta vizuālās atpazīšanas un materiāla atpazīšanas risinājuma ātrdarbība. Ja pirms pētījuma objekta atpazīšanai bija nepieciešamas 1 līdz 2 sekundes, tad pētījuma noslēgumā ir sasniegta izlīdzināta sistēmas ātrdarbība, vienu objektu apstrādājot 0,1 līdz 0,2 sekunžu laikā. Pateicoties tam, tika sabalansētas atpazīšanas un pārvietošanas sistēmas, panākot optimizētu manipulatora darbību.
Pētniecības projekta gaitā ir iegūtas jaunas zināšanas un izveidots kompakta manipulatora prototips, kas izpilda vadības sistēmas dotos uzdevumus pēc tam, kad veic dažādu objektu atpazīšanu ar datorredzes palīdzību un iegūto attēlu analīzi.
Izveidotajā attēlu analīzes sistēmā tiek izmantots dziļās mašīnmācīšanās princips. Sistēma tiek iepazīstināta ar dažādu iepakojumu attēliem, pēc kuriem dziļās mašīnmācīšanās algoritmi rada iespēju atpazīt iepakojumu arī tad, ja tas ir nepilnīgi redzams vai arī bojāts, vai arī pagriezts dažādos leņķos. Objektu vizuālā atpazīšana tie realizēta gan redzamās gaismas spektrā, gan tuvu infrasarkanajam starojuma spektram (Near Infrared , NIR) diapazonā ar Hiperspektrālās analīzes metodi.
Izmantojot jaunās zināšanas, ir izveidots kompakta manipulatora prototips, kas spēj atpazīt gan jau apmācības gaitā iepazītus objektus un materiālus, gan konstatēt, ka objekts vai tā materiāls nav pietiekami atpazīstams un ka tādēļ tas jānovirza papildus izpētei un klasifikācijai, ko veic operators-eksperts.
Jauno zināšanu un izveidotā prototipa pielietojuma virziens noteikti ir atkritumu šķirošanas risinājumi, kas paaugstinās dažādu polimēru materiālu atkārtotu izmantošanu, jo tiks nodrošināta to korekta klasifikācija un nodalīšana pārstrādes vajadzībām.