01.06.2018-31.08.2018
Izstrādāts prototips iekārtai ar darba procesā pasapmācošu vadības sistēmu optimālas apstrādes paņēmienu pielietošanai.
01.04.2018 – 30.05.2018
Daļēji izstrādāts prototips iekārtai ar darba procesā pašapmācošu vadības sistēmu optimālas apstrādes paņēmienu pielietošanai.
01.01.2018 – 31.03.2018
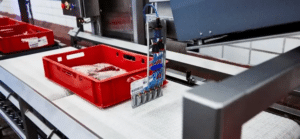
Izstrādāts prototips iekārtai, kas spēj sašķirot lielu daudzumu haotiski novietotu sīku objektu un novietot tos grupējot.
Izstrādāts prototips iekārtai, kas spēj veikt objektu novērtēšanu un apstrādes darbību izvēli.
01.10.2017 – 01.01.2018
Izveidoti viena uzdevuma funkcionālie moduļi, kuros realizēti nepieciešamie analīzes un izpildrīki pašapmācošās vadības sistēmās variantu testēšanai.
31.07.2017 – 01.10.2017
Prototipa otrajam modulim risinājumu variantu izstrāde, kuru nepieciešamība parādījās, pārbaudot iekārtu daļu veiktspēju, testējot uzdevumu veikt objektu novērtēšanu un apstrādes darbību izvēli, atkarībā no sensoru iegūtās informācijas par objektiem.
01.04.2017 – 31.07.2017
Risinājumu variantu izstrāde prototipa pirmajam modulim, kuru nepieciešamība parādījās, pārbaudot iekārtu daļu veiktspēju, testējot uzdevumu veikt objektu novērtēšanu un apstrādes darbību izvēli, atkarībā no sensoru iegūtās informācijas par objektiem.
01.02.2017 – 01.04.2017
Izgatavots iekārtas makets, kurā realizēta datorredzes komandsistēma secīgi padotām, pa vienai rindā, paraugzivīm un izveidota attēlu bibliotēka neironu tīkla principu realizācijai.
01.10.2016 – 31.01.2017
Izstrādāti prototipa principiālās shēmas divi darba varianti, veikts to salīdzinājums un formulēts kompilētais fināla variants, iekārtas izstrādei, ar uzdevumu sašķirot lielu daudzumu haotiski novietotu sīku objektu un novietot tos grupējot.
Laika periodā no 1.06.2016 – 31.10.2016 ir veikti pētījuma izpētes darbi un eksperimenti, lai atrastu potenciāli atbilstošākos 3D datorredzes risinājumus, kas efektīvi spētu sadarboties ar mehāniskām izpildsistēmām, gan iekārtas darbību pamatā veicot paralēlās plaknēs ar 3 asu koordinātēm, gan iekārtas darbību pamatā veicot telpiski 5 asu koordinātēs. Veidota zivju kontūru datubāze, ar kuru salīdzinātu attēlu apstrādes rezultātus, lai dotu izpildkomandas mehāniskajām sistēmām.
2016.gada 18. oktobrī noslēgts līgums ar SIA “MAŠĪNBŪVES KOMPETENCES CENTRS” nr.1.1.-1/2016 Par Pētījuma Nr.1.1 “Pārtikas ražošanas iekārtu platformas izstrāde ar izpildmehānismos iebūvētu matemātiskā attēlu apstrādē un sensoru tehnoloģijās balstītu “inteliģentu” pašvadītspēju” īstenošanu.