Darbības programmas “Izaugsme un nodarbinātība” 1.2.1. specifiskā atbalsta mērķa “Palielināt privātā sektora investīcijas P&A” 1.2.1.1. pasākumā “Atbalsts jaunu produktu un tehnoloģiju izstrādei kompetences centru ietvaros” SIA “MAŠĪNBŪVES KOMPETENCES CENTRS” no 2019.gada 1.aprīļa līdz 2021.gada 31.decembrim īsteno projektu Nr.1.2.1.1/18/A/008 “Mašīnbūves kompetences centrs”.
Projekta “Mašīnbūves kompetences centrs” ietvaros SIA “PERUZA” 2019. gada 1.aprīlī uzsāk pētniecības projekta Nr. 1.1“Procesa izpēte un prototipa izveidošana sadzīves atkritumu tūlītējas dalītas šķirošanas konteinerstacijai ar lokāli un attālināti vadītu robotmanipulatoru pielietojumu un izveidojumu daudzdzīvokļu māju pagalmos” īstenošanu.
Pētniecības projekta mērķis ir izveidot kompaktu autonomu atkritumu pieņemšanas un tūlītējas šķirošanas konteineršūnu, kurā tiks veikta tūlītēja vaļīgi sabērto atkritumu šķirošana ar robotmanipulatoriem, ko vadīs lokālā datorredzes un analīzes sistēma, kuru trenēs mākslīgā intelekta sistēma, kura atradīsies attālināti, kurai paralēli asistēs šo manipulatoru parka operatori – cilvēki, kas atrisinās datorredzei nesaprotamus gadījumus. Sašķirotie atkritumi tiks pārvietoti dalītās uzkrāšanas kasetēs un jau sašķiroti tiks nogādāti tālākajai apstrādei.
Pētījumu plānots realizēt līdz 2021.gada 30.novembrim.
Projekta kopējās izmaksas plānotas EUR 857 028.00, tai skaitā EUR 345 249.30 Eiropas Reģionālās attīstības fonda finansējums.
Laika periodā no 01.04.2019- 30.06.2019 Pētījuma veikšanai izveidotas 3 iesaistīto inženieru grupas, tika pētīti zināmie atkritumu šķirošanas paņēmieni, to automatizācijas pieredze, izmantotie mehāniskie un automatizācijas risinājumi. Apzinātas iespējamās mehanizācijas un robotizācijas problēmas. Dažādu datorredzes un citu sensoru pielietojums, izmantoti dažādi risinājumu salikumi. Veikta, uz atkritumu šķirošanas rūpnīcām, piegādāto atkritumu uzmērīšana un klasifikācija pēc to formas un izmēru parametriem, pēc to materiāla un piesārņojuma pakāpes ar citiem atkritumiem.
Laika posmā no 01.07.2019 – 30.09.2019 pētījumā veiktas dažādu sadzīves atkritumu masu un to salikumu morfoloģiskās izpētes, atkritumu veidu zināmo atdalīšanas paņēmienu analīze, vaļēji sabērtu atkritumu atdalīšanas veidu izpēte; atkritumos pieejamo objektu materiālu izpēte, to satveršanai un pārvietošanai zināmo orgānu un paņēmienu izpēte un paņēmienu novērtējumi ir sagatavojuši pamatu projektā iecerēto prototipu konstruktīvā un funkcionālā risinājuma robežlielumu noteikšanai. Salīdzināti zināmie paņēmieni un instrumentu kopa, pārbaudītas jaunu paņēmienu hipotēzes un to prototipi, izveidota risinājumu matrica piemēroto paņēmienu un instrumentu izvēlei Latvijā pieejamo atkritumu efektīvai atdalīšanai.
Laika posmā no 01.10.2019 – 31.12.2019 veikta dažādu materiālu satvērēju un to pieejamo piedziņu risinājumu izmēģinājumi atkritumu poligonos. Risinājumu matricas veidošana prototipu formulējumam jaunu paņēmienu atkritumu efektīvai atdalīšanai. Iekārtas un apstrādājamo materiālu mijiedarbības pieejamo risinājumu salāgošana. Vienkāršu funkcionālu satvērēju modeļu darbības pārbaude ar atsevišķiem atkritumu veidiem Veikti dažādu dzērienu iepakojuma materiālu atpazīšanas testi ar dažādu sensoru kombināciju. Turpināts pētīt un salīdzināt paņēmienus un instrumentus atkritumu satveršanai un atdalīšanai. Izveidots atkritumu šķirošanas lokālās stacijas 3D modelis.
Laika posmā no 01.01.2020 – 30.03.2020
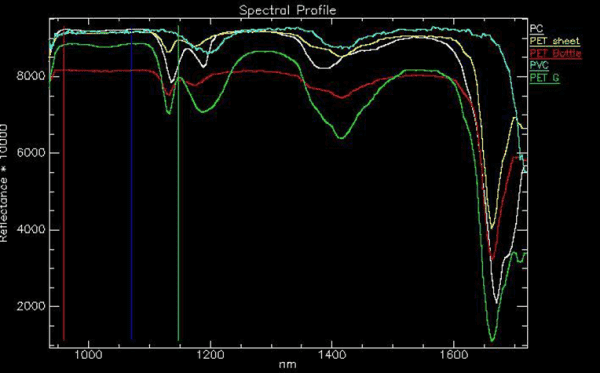
Veiktas eksperimentu sērijas ar dažādiem polimēru spektrālas analīzes metodēm. Vislabāk piemērotos rezultātus izdevās iegūt ar hiperspectrālo analīzi, kas papildināta ar sarežģītu attēlu matemātiskas apstrādes modeli. Lai gan lielāko daļu sadzīves atkritumu objektu var atpazit un atšķirot ar vienkāršakiem datorredzes paņemieniem, polimēru materiali bieži rada izaicinājumus tos pareizi atpazīt. Īpaši problemātiski ir PET grupas materiali, tādi kā pamatkompozīcija, PET-G un PET SHEET, kam ir tuvas optiskas īpašības. Jāunā pielietotā metode ļāuj risināt šos sarežģītos uzdevumus un veidot stabili strādajošus šķirošanas risinājumus.
Problēmas sadzīves atkritumu šķirošanā rada liela izmēra plakani objekti kā plēves, papīrs, tekstīlijas. Eksperimentālās izstrādes gaitā tiek veidotas vairākas palīgierīces, kas veic minēto plakano objektu priekšatšķirošanu, tādejādi uzlabojot vērtīgo otrreizējo izejvielu atgūšanu.
Veidojot optimālus atkritumu risinājumu iekārtu salikumus, ir konstatēts, ka optimāli ir kombinēt atvieglotas konstrukcijas robotmanipulatorus ar attīstītām sensoru un datorvadības sistēmām, tāpēc ir uzsākta šāda atvieglota manipulatora konstruēšana.
Laika posmā no 01.04.2020 – 30.06.2020
Periodā paveiktais 1.aktivitātē “Rūpnieciskais pētījums”: Polimēru materiālu atpazīšanas pētījumi pēc to atstarošanās īpašībām NIR (Near InfraRed) spektra daļā.
Polimēru materiāli ir vērtīga otrreizēja izejviela, taču tikai tad, ja tie nav sajaukti savā starpā. Īpaši izaicinoši ir ātri atšķirot caurspīdīgus polimēru materiālus, tādus kā PET, PET-G, PET sheet, PC, PVC. Pētījumos atklāts, ka pietiekami precīzi un ar saprātīgām izmaksām šo uzdevumu var veikt izmantojot hiperspekrālās kameras, kas analizē noteikta garuma gaismas starus tuvu infrasarkanajam spektram, kas atstarojas no materiāla. Pētījumu rezultātā ir veikts iepirkums, lai 2.aktivitatē “Eksperimentālā izstrāde” šo risinājumu ieviestu iekārtā. Attēlā parādītas histogrammas, kuras redzamas spektrālo līniju atšķirības, kas var palīdzēt korekti atpazīt dažādus polimēru materiālus.
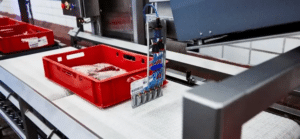
Periodā paveiktais 2.aktivitatē “Eksperimentālā izstrāde”: Datorizētas robotizētas iekārtas risinājuma prototipa konstruēšana un izgatavošana
Lai izmaksu efektīvi un sekmīgi veiktu sadzīves atkritumu šķirošanu tuvu to radīšanas vietai, ir jāizveido efektīvs piemērots robotmanipulators. Esošie tirgū pieejamie manipulatori ir veidoti precīzāku uzdevumu veikšanai, tāpēc tie ir salīdzinoši dārgi. PERUZA izstrādā datorizētas robotizētas iekārtas risinājuma prototipu, kas tieši atbilstu uzdevumam. Ir izveidots un sekmīgi izmēģināts prototips, lai noskaidrotu, ka tā konstrukcija ir mehāniski darboties spējīga. Tālākā darbā ir jāstrādā pie nepieciešamo satvērējmehānismu izveides un pilnveides.
Laika posmā no 01.04.2020-30.09.2020 (3.pētijuma periods)
Rūpnieciskā pētījuma sadaļā tika veikti iepazīšanās darbi ar hiperspektrālās analīzes kameru SPECIM FX-17 un dažādu materiālu izpētes darbi, savukārt Eksperimentālās izstrades sadaļā tika konstruētas, izgatavotas un testētas vairākas vienkāršota manipulatora modifikācijas.
Līdzšinēji zināmie dažādu atkritumu atpazīšanas paņēmieni, tai skaitā datora vadīta spektrālā analīze, ir devusi līdz 80% materiāla atpazīšanas un korektas klasifikācijas precizitāti. Visi zināmie paņēmieni vislabāko rezultatu ir devuši gadījumos, kad materiāli tiek padoti izkliedēti un vēlams priekšatdalīti.
Pētījumi tika veikti tieši ar hiperspektrālo metodi, pielietojot svītras nolasīšanas paņēmienu. Šīm nolūkam PERUZA ir iegādājusies hiperspektrālās redzes kameru SPECIM FX-17, kuras darbības apgūšana un eksperimentu veikšana bija svarīgākais Rūpnieciska pētījuma sadaļas uzdevums. Iegūtie rezultati liek secināt, ka hiperspektrālā analīze ir piemērota rūpnieciskajiem tiešsaistes lietojumiem, kur tiek mērīti kustīgi un mainīgi mērķi un nepieciešama spektrālā līdzreģistrācija. Izvērtējot gaismas savākšanas efektivitāti un apgaismojuma izmantošanas efektivitāti, pētījuma rezultāti ir pierādījuši, ka hiperspektrālās analīzes svītras paņemiens paspējīgs strādāt ar līdz 900 reizes īsāku ekspozīcijas laiku, pie tam dodot arī augstāku integrālā attēla veidošanas ātrumu.
3.starpposmā sasniegts uzstādītais mērķis – Eksperimentālās izstrādē sadaļā ir veikta vienkāršota manipulatora konstruēšana, izgatavošana pielāgotā veidā un uzsākta testēšana Latvijā raksturīgo atkritumu efektīvai atdalīšanai. Jauna tipa vienkāršota manipulatora izveide ir izrādījies svarīgs priekšnosacījums kompleksam atkritumu šķirošanas risinājumam. Esošie manipulatori ir vai nu pārāk precīzi savā darbībā un tāpēc lēnīgi, vai arī jutīgi pret putekļiem piesārņotu darba vidi. PERUZA savu novērojumu atkritumu poligonnos rezultatā ir nonākusi pie vienkāršotas, viegli apkalpojamas iekārtas shēmas. Tās priekšrocība ir galveno mezglu pieejamība un vienkārša nomaiņa.
Laika posmā no 01.10.2020 – 31.12.2020 pētījumā
Veikti pētījumi ar hiperspektrālās redzes kameru SPECIM FX-17. Līdzšinēji zināmie dažādu atkritumu atpazīšanas paņēmieni, tai skaitā datora vadīta spektrālā analīze, ir devusi līdz 80% materiāla atpazīšanas un korektas klasifikācijas precizitāti, taču pētījuma uzdevums ir paaugstināt sistēmas atpazīšanas spēju, un to varēja sasniegt tikai ar minētās kameras pielietojumu. Tika veikta atkritumu šķirošanas procesa un iekārtas dartorsimulācija. Ir uzbūvēts jauna tipa manipulators ar datorredzes moduli, ka norāda uz nošķirojamajiem priekšmetiem, notiek tā vadības sistēmas trenēšana.
Laika posmā no 01.01.2021 – 31.03.2021
Eksperimentālās izstrādes gaitā ir izveidots vienkāršots atkritumu šķirošanas iekārtas prototips, sākotnēji tā konstrukciju pārbaudot ar datorsimulācijas palīdzību. Veikta vienkāršota manipulatora konstrukcijas datorsimulācija, izgatavošana pielāgotā veidā un uzsākta iekārtas trennēšana atkritumu efektīvai atdalīšanai.
Nākamajās prototipa versijās ir jāuzstāda virkne sensoru, kas mērīs celšanas – vilkšanas slodzes, lai pasargātu manipulatoru no saliekšanās, ka arī lai elastīgi vadītu manipulatora vilkšanas kustības zig-zag trajektorijā, kas var palīdzēt atbrīvot objektu, kas ir daļēji apsegts un piespiests.
Datorredzes moduļa attīstības sadaļā ir savietotas divas kameras, kas sinhroni uzņem uz konveijera lentas sabērtas atkritumu masas attēlus, izolē atsevišķus objektus attēlos katra savā darbības diapazonā, tad to projicē uz koordinātu tīkla, lai piešķirtu objektiem koordinātes, kurp nosūtīt manipulatoru.
Objektu korektā klasifikācijā izšķiroša loma ir hiperspektrālās redzes kamerai, kas darbojas 900nm līdz 1700 nm diapazonā. Ja tiek realizēta slīdoša daudzu spektrālās atbildes rezultātu analīze visā diapazonā no 900 nm līdz 1700 nm, tad katru reizi, kad tiek reģistrētas lokālās histogrammu izmaiņas, tiek radīta pārliecinoša atbilde par konkrētās koordinātēs atrodošu materiālu, un tas savukārt ļauj to pamatoti atdalīt un sašķirot tālākai pārstrādei.
Laika posmā no 01.04.2021 – 30.06.2021
Veikta vienkāršota manipulatora konstrukcijas datorsimulācija, uzsākta iekārtas trennēšana atkritumu efektīvai atdalīšanai.
Celšanas – vilkšanas slodzes sensoru darbības pētījums, optimālās sensoru darbības noteikšana, lai pasargātu manipulatoru no saliekšanās, ka arī lai elastīgi vadītu manipulatora vilkšanas kustības zig-zag trajektorijā, kas var palīdzēt atbrīvot objektu, kas ir daļēji apsegts un piespiests.
Laika posmā 01.07.2021 – 30.09.2021
Konstruējot, modelējot un izgatavojot vairākus atkritumu šķirošanas staciju variantus, ir pieņemts lēmums prototipa gala versijā izgatavot divas dažādas atkritumu šķirošanas sistēmas, kurās tiks pielietoti dažādi manipulatori un dažadi satvērēji. Paredzēts izveidot vienotu vadības sistēmu, kas būs spējīga vadīt un kontrolēt atkritumu šķirošanas procesu neatkarīgi, kāds manipulatoru risinājums konkrētā gadījumā tiks izmantots
Eksperimentālās izstrādes laikā ir atrisināta ļoti svarīga problēma: atkritumu maisiņu atvēršana un atkritumu izkliedēšana kvalitatīvai atpazīšanai, novertēšanai un sašķirošanai.
Datorredzes sistēmas attīstības gaitā ir izveidota sistēma, kas spēj lokalizet un novērtēt izkliedētos atkritumu objektus, lai dotu manipulatoru vadības sistēmai kvalitatīvas instrukcijas atkritumu atbilstošai sasķirošanai pēc materiāla un iespējas tos pārstrādāt.
Laika posmā no 01.10.2021 – 31.12.2021
Datorizētas robotizētas iekārtas izgatavošana un programmēšana – paveiktie darbi:
- Šķirošanas konteineršūnas montāža: izgatavotas 2 autonomas atkritumu šķirošanas šūnas, kas sadarbojas savā starpā informācijas apmaiņā, veikta manipulatoru paralēlās sadarbības programmēšana, tāpat notiek atkritumu šķirošanas šūnu un eksperta sadarbības programmēšana
- Datorredzes un citu sensoru kalibrācija veikta, lai uzlabotu dažādu parametru atpazīšanu atkritumu šķirošanas veikšanai, lai gatavotos gala testēšanai
Tiek pilnveidota un programmēta sistēmas konfigurācija:
- Sākotnēji eksperts apmāca sistēmu, katru reizi klasificējot priekšmetus;
- Klasificētiem priekšmetiem serverī tiek saglabāta informācija par formu, materiālu, krāsu, etiķeti;
- Pakāpeniski katra šūna palielina savu patstāvīgo lēmumu pieņemšanas notikumu daudzumu;
- Šūnas iegūst instrukcijas no servera, kurā informāciju ievietojušas citas šūnas un eksperts.
Laika posmā no 01.01.2022 – 28.02.2022
Patreizējā atkritumu savākšanas sistēma, īpaši sadzīves atkritumu savākšanā, balstās uz centralizētām atkritumu šķirošanas rūpnīcām, kuras vērtīgie pārstrādājamie atkritumi nonāk daļēji sabojāti mehāniski un arī notraipīti ar citiem atkritumiem to kompaktēšanas procesā savācējautomašīnā, lai atkritumu pārvadāšana uz poligonu būtu efektīva. Datorizēta lokāla šķirošanas sistēma ļauj sabērtos atkritumus savlaicīgi atdalīt pa grupām, lai tālākais pārstrādes process būtu kvalitatīvāks, pie tam ir iespējams ieviest lokālas atkritumu šķirošanas veicināšanas shēmas tieši atkritumu veidošanās vietās. Piedāvātā jaunā decentralizētā atkritumu šķirošanas koncepta būtība ņem vērā būtiskus aspektus, kā iedzīvotāju paradumi un to ietekmēšanas iespējas, ka arī tehnisko aspektu, ka lielajās šķirošanas rūpnīcās atkritumi nonāk daļēji sabojāti, salīdzinājumā ar to stāvokli, kādā tie ir iebērti daudzdzīvokļu pagalma atkritumu urnā.
- Izstrādāti divu atšķirīgas konstrukcijas atkritumu šķirošanas staciju prototipi ar kopīgu vadības sistēmu, veikta to testēšana.
- Atrisināts plastmasas maisiņu atvēršanas uzdevums, kas ļauj atbrīvot atkritumus to atpazīšanai un šķirošanai
- Izveidota un pārbaudīta datorredzes sistēma atkritumu lokalizācijai, kas nepieciešams manipulatoru nosūtīšanai to šķirošanai
- Izveidota un pārbaudīta datorvadības sistēma atkritumu šķirošanas vadībai un staciju savstarpējai sadarbībai